Наземний дрон SKOOTR отримав три ноги та сферу всередині.
Дослідницька група з Мічиганського університету розробила триногий наземний дрон з назвою SKOOTR, який котиться під час ходьби, може рухатися в будь-якому напрямку та підіймає себе, щоб подолати перешкоди, які б зупинили інші дрони, інформує ФОКУС.
Ідея проєкт SKOOTR (Skating, All-Oriented, Triped Robot, триногий робот, що котиться та переміщується на три сторони) — виникла в доцентки Талії Мур з лабораторії еволюції та руху у біології та робототехніці (EMBiR) Університету Мічигану. Праця опублікована на сайті arXiv.
“Ця ідея прийшла мені в голову, коли я каталася на офісному стільці між групами студентів. Я усвідомила, що офісне крісло, яке пасивно котиться, може легко обертатися в будь-якому напрямку, і я могла використовувати свої ноги, щоб виконувати різноманітні маневри, залишаючись при цьому надзвичайно стабільною. Я зрозуміла, що ця всюди спрямована маневровість схожа на те, як морські зірки змінюють напрям під час руху”, — сказав Мур.
Один із її студентів, Адам Ханг, вирішив спроєктувати та створити робота з подібними можливостями за допомогою Челлена Еннінфула Аду та Мур. Попри те, що триногі роботи можуть крутитися на місці, підняття однієї з цих кінцівок для руху може призвести до неефективного та динамічно нестабільного пересування. Щоб уникнути цього недоліку, Ханг додав до конструкції сферу, що вільно обертається.
SKOOTR має структуру керування в центрі, яка включає плату комп’ютера Arduino Uno, інерціальний вимірювальний блок та Li-Po акумулятором. Він також оснащений підвісним каркасом зі сферичними підшипниками, які контактують зі сферою в чотирьох точках.
Кожна з ніжок має два плоских обертальних шарніра, які приводяться в дію стандартними сервоприводами. “Гібридний кінцевий ефектор” розташований на кінчику кожної ноги, де невеликий сервопривід висуває сферичний підшипник для контакту кочення або втягує його так, щоб гумовий ковпачок притискався до поверхні, щоб штовхати або тягнути дрон.
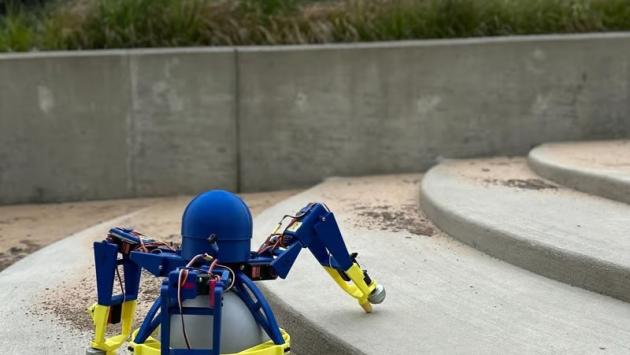
Велика центральна сфера забезпечує боту додаткову точку контакту під час руху для кращої стабільності. Але механізм також може захопити кулю, підняти її над підлогою та дозволити ногам переходити через перешкоди, такі як сходинки чи сміття, перш ніж знову опустити його та відштовхнутися.
“Завдяки цій комбінації центральної сфери та кількох ніг SKOOTR неймовірно стабільний. Ми проводили багато експериментів зі SKOOTR — практично неможливо перевернути його, поки він працює. Він також здатний на набагато більше, ніж ви могли б подумати, просто дивлячись на таку ходу. Піднімаючи сферу за допомогою ніг, SKOOTR може долати перешкоди, які було б важко для інших рухомих роботів. SKOOTR може навіть підійматися сходами”.
Плани збірки, файли CAD та код є відкритими, багато частин робота можна надрукувати на 3D-принтері за допомогою нитки PLA, а стандартні компоненти можна придбати онлайн. Орієнтовна вартість проєкт становить близько 500 доларів США.
Команда EMBiR бачить потенційні застосування дрона у картографуванні та дослідженні складних внутрішніх середовищ, а також у доставленні корисного навантаження. Наступні кроки включають додавання датчиків для автономної локалізації, планування руху та картографування.















