Наземный дрон SKOOTR получил три ноги и сферу внутри.
Исследовательская группа из Мичиганского университета разработала трехногий наземный дрон под названием SKOOTR, который катится во время ходьбы, может двигаться в любом направлении и поднимает себя, чтобы преодолеть препятствия, которые бы остановили другие дроны, сообщает ФОКУС.
Идея проект SKOOTR (Skating, All-Oriented, Triped Robot, трехногий робот, который катится и перемещается на три стороны) — возникла у доцента Талии Мур из лаборатории эволюции и движения в биологии и робототехнике (EMBiR) Университета Мичигана. Работа опубликована на сайте arXiv.
«Эта идея пришла мне в голову, когда я каталась на офисном стуле между группами студентов. Я осознала, что офисное кресло, которое пассивно катится, может легко вращаться в любом направлении, и я могла использовать свои ноги, чтобы выполнять разнообразные маневры, оставаясь при этом чрезвычайно стабильной. Я поняла, что эта везде направленная маневренность похожа на то, как морские звезды меняют направление во время движения», — сказал Мур.
Один из ее студентов, Адам Ханг, решил спроектировать и создать робота с подобными возможностями с помощью Челлена Эннинфула Аду и Мур. Несмотря на то, что трехногие роботы могут крутиться на месте, поднятие одной из этих конечностей для движения может привести к неэффективному и динамически нестабильному передвижению. Чтобы избежать этого недостатка, Ханг добавил в конструкцию свободно вращающуюся сферу.
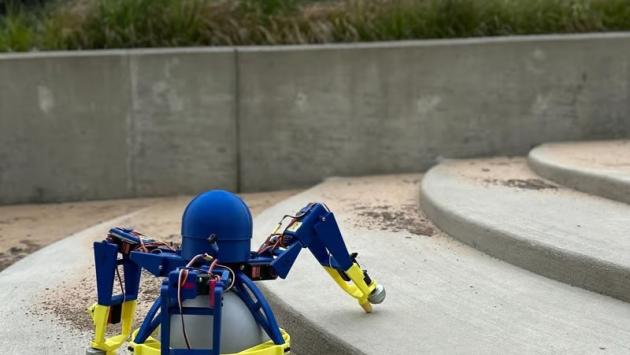
SKOOTR имеет структуру управления в центре, которая включает плату компьютера Arduino Uno, инерциальный измерительный блок и Li-Po аккумулятором. Он также оснащен подвесным каркасом со сферическими подшипниками, которые контактируют со сферой в четырех точках.
Каждая из ножек имеет два плоских вращательных шарнира, которые приводятся в действие стандартными сервоприводами. «Гибридный концевой эффектор» расположен на кончике каждой ноги, где небольшой сервопривод выдвигает сферический подшипник для контакта качения или втягивает его так, чтобы резиновый колпачок прижимался к поверхности, чтобы толкать или тянуть дрон.
Большая центральная сфера обеспечивает боту дополнительную точку контакта во время движения для лучшей стабильности. Но механизм также может захватить шар, поднять его над полом и позволить ногам переходить через препятствия, такие как ступеньки или мусор, прежде чем снова опустить его и оттолкнуться.
«Благодаря этой комбинации центральной сферы и нескольких ног SKOOTR невероятно стабилен. Мы проводили много экспериментов со SKOOTR — практически невозможно перевернуть его, пока он работает. Он также способен на гораздо большее, чем вы могли бы подумать, просто глядя на такую походку. Поднимая сферу с помощью ног, SKOOTR может преодолевать препятствия, которые было бы трудно для других подвижных роботов. SKOOTR может даже подниматься по лестнице».
Планы сборки, файлы CAD и код являются открытыми, многие части робота можно напечатать на 3D-принтере с помощью нити PLA, а стандартные компоненты можно приобрести онлайн. Ориентировочная стоимость проекта составляет около 500 долларов США.
Команда EMBiR видит потенциальные применения дрона в картографировании и исследовании сложных внутренних сред, а также в доставке полезной нагрузки. Следующие шаги включают добавление датчиков для автономной локализации, планирования движения и картографирования.







